We developed a table tennis robot that recognizes a ball using a camera and returns the ball on a tabletop. We also designed and built a custom robot system and robot arm with human-like motion and appearance.
We focused on the importance of suture length management and force feedback, and successfully achieved continuous autonomous suturing using the PR2 dual-arm personal robot. This work was presented at the Annual Conference of the Japan Society of Computer Aided Surgery.
Tsubatar Robot
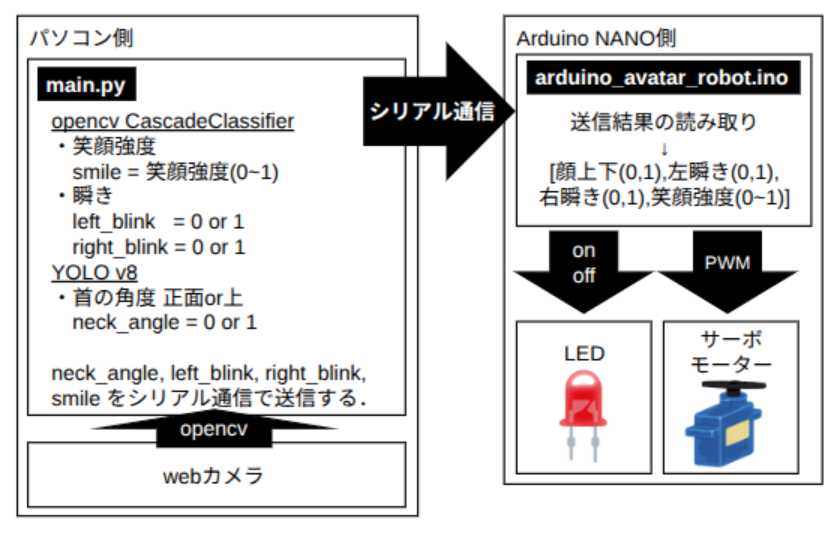
System Diagram
We developed an 1 DoF avatar robot that recognizes human faces (smiling and blinking) and head posture using YOLO and OpenCV, and performs real-time interaction and expression.
For more details, please refer to the report below. This project was presented at the Advanced Programming in Mechanical Engineering Conference.
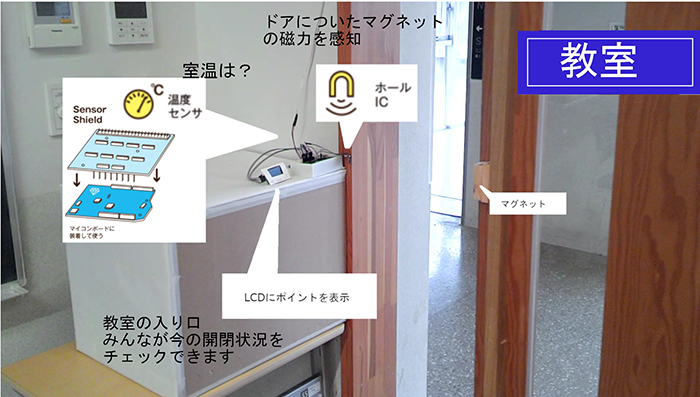
At the Rohm Open Hack Challenge 2018, I developed an innovative system that reduces energy waste from air conditioners using gamification, electronics prototyping, and microcontroller programming. Despite being a high school student at the time, I received the Excellence Award.
For more details, please refer to the interview article.
I maintain two Julia packages below for robotics and control applications.
ROS2.jl
ROS2.jl is a Python wrapper package for the ROS2 Python3 client (rclpy). If you want to integrate Julia's rich robot modules with ROS, please use this package.
For ROS1, there is RobotOS.jl. An example of connecting Julia's inverse kinematics model with RobotOS can be found here.
DualQuatUtils.jl
DualQuatUtils is a utility module for calculating rotations, quaternions, and dual quaternions in the Julia programming language.
It is intended for applications in robotics and drone control and motion planning. Since Juali's default Quaternion does not support dual quaternions, this package is useful.
Other than that, I worked as a software engineer using Julia at Proxima Technology Inc.